|
Contrairement aux installations de fusion actuelles, ITER puis les futurs
réacteurs de fusion devront ętre en mesure de réaliser la quasi-totalité
des opérations de maintenance et d'inspection de la chambre ŕ vide avec
des outils robotisés. La chambre ŕ vide d’un tokamak est l’enceinte ŕ
l’intérieur de laquelle le plasma chaud est créé. Les conditions de
fonctionnement sont caractérisées par un vide qui atteint 10-6
Pa , une température de 120°C, la présence d’un champ magnétique et de
rayonnements.
Depuis 2003, l’Association
Euratom-CEA s’est engagée dans un programme de développement et de
qualification dans Tore Supra d’un bras robot poly-articulé appelé AIA (Articulated
Inspection Arm) capable de se déployer dans l’enceinte ŕ vide d’un tokamak
de fusion, dans un premier temps sans présence de champ magnétique.
Ces études, financées par
le programme fusion européen, les collectivités locales (région PACA et
département des Bouches-du-Rhône) et le CEA, vont permettre la
démonstration des possibilités d’action sous vide (10-6 Pa) et
en température (120°C) dans l’enceinte du réacteur expérimental ITER.
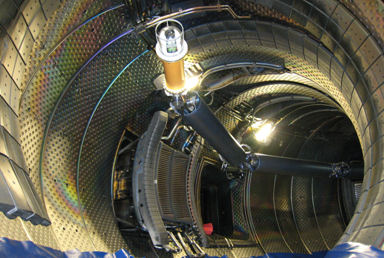
Le robot a un élancement
total de 8m et une capacité de charge en extrémité de 10 kg. Il est
composé de 5 segments en titane (Ř160 mm) qui intčgrent les éléments
électrotechniques nécessaires au pilotage des articulations (figure 1). Le
systčme complet présente 10 degrés de liberté suivant des axes horizontaux
et verticaux.
Il sera porteur en son
extrémité d’un ou plusieurs procédés d’inspection (caméra haute
définition, systčme de détection de fuite) ou de traitement des Composants
Face au Plasma (traitement de surface par ablation laser, analyses
physico-chimiques de la surface, récupération de poussičre) ou encore
d’autres procédés restant ŕ définir.
L’enjeu actuel du projet
AIA est de confirmer les capacités et la fiabilité du robot lors de son
usage dans des conditions représentatives du fonctionnement sur ITER. Sa
mise en exploitation sur l’installation Tore Supra permettra d’envisager
de nouvelles perspectives pour la maintenance et les activités
télé-opérées nécessaires sur les futures machines de fusion.
Un segment prototype de l’AIA
a été qualifié ŕ l’été 2006 ; des cycles d’endurance ŕ 120°C et de
conditionnement sous vide ŕ 200°C ont permis une validation fonctionnelle
du concept.
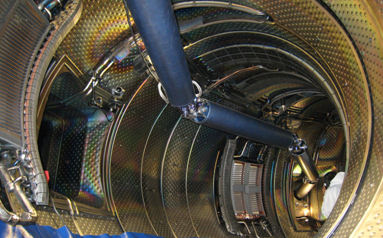
En septembre 2007, le
robot, associé au procédé de vision embarqué, a réalisé ses 1ers
déploiements complets dans l’enceinte de Tore Supra sous conditions
atmosphériques (figure 2).
Ces résultats prometteurs
permettent d’envisager, en 2008, les 1ers
déploiements du robot AIA sous conditions représentatives de vide et de
température.
|